import re
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
import slycot
slycot.__version__'0.5.0.0'Einige Methoden von Python-Control basieren auf der Fortran-Bibliothek SLICOT, welche in dem Python Modul Slycot verpackt sind.
Python-Control gliedert sich also in drei Teile:
Die Subroutinenbibliothek SLICOT bietet Fortran 77-Implementierungen numerischer Algorithmen für Berechnungen in der System- und Regelungstheorie. Basierend auf Routinen der numerischen linearen Algebra aus BLAS- und LAPACK-Bibliotheken bietet SLICOT Methoden für den Entwurf und die Analyse von Steuerungssystemen.
Die aktuelle Version von SLICOT besteht aus über 600 vom Benutzer aufrufbaren Routinen. Der SLICOT Kern zielt auf die Wiederverwendbarkeit der Routinen in verschiedenen Sprachen. So werden einige Routinen von Projekten in Matlab, Octave, Scilab, R, Julia oder Python verwendet.
Nachteilig ist, dass der Fortran 77 Standard für moderne Augen schwer zu lesen ist. Mithilfe des Slycot Paketes können wir jedoch auf gewisse Methoden zugreifen und uns so auch indirekt mit den SLICOT Routinen vertraut machen. Einerseits können wir so Algorithmen besser verstehen, andererseits auch das Python-Control Projekt besser kennenlernen.
Die SLICOT-Bibliothek ist nach Kapiteln organisiert. Jedes Kapitel kann durch einen einzelnen Buchstaben identifiziert werden. Folgende Kapitel sind enthalten:
Die Dokumentation von SLICOT ist online verfügbar. Es enthält die vollständigen Beschreibungen aller verfügbaren Subroutinen.
Derzeit stehen bei weitem nicht alle SLICOT Methoden in Slycot zur Verfügung. Wir können die Methoden unter der Zuhilfenahme von Regular expression und dem Befehl dir() herausfiltern.
import re
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
import slycot
slycot.__version__'0.5.0.0'In der Textdatei slicot_methods.txt sind alle Routinen der SLICOT Bibliothek aufgelistet.
with open('slicot_methods.txt') as f:
lines = f.readlines()
slicot_methods = [x.split("\n")[0] for x in lines]
print(slicot_methods)
print(f"Derzeit in Slicot {len(slicot_methods)} Routinen implementiert.")['mb01wd', 'tg01gd', 'ab13fd', 'sg03ay', 'mb01oe', 'mb02fd', 'tg01oa', 'dg01ny', 'sg03ax', 'fb01qd', 'ma02az', 'mc01md', 'md03by', 'tf01mx', 'ib01nd', 'mb02rz', 'mb04bp', 'tb01kd', 'ab09gd', 'ma02jz', 'ud01cd', 'ib01rd', 'nf01bx', 'mb02rd', 'ma02es', 'mb04iy', 'tg01id', 'mb01rd', 'mc01xd', 'mb04wr', 'sg03bs', 'mb03kc', 'ma02cd', 'tb04ad', 'md03bx', 'mb03vy', 'ab09cd', 'tf01nd', 'sb09md', 'sb03ot', 'mb04pu', 'mb04yd', 'mb02pd', 'mb04tu', 'mb02ud', 'ib01cd', 'mb04dp', 'tg01fz', 'sb04od', 'nf01ad', 'mb03qd', 'ab09bd', 'mb02jd', 'sb02mw', 'ma02ad', 'mb04dl', 'sb08ed', 'tb01uy', 'md03ba', 'ab05nd', 'mb03pd', 'sb02mx', 'sb04ow', 'ma02mz', 'mb02cy', 'ag08by', 'mb03bb', 'ab09cx', 'mb01kd', 'sb02sd', 'mb01xd', 'sb01md', 'mb02ny', 'sb02ox', 'sb10pd', 'ma01cd', 'tg01hd', 'mb02nd', 'sb02cx', 'sb04px', 'mb03qg', 'tg01hx', 'mb03ag', 'mc01py', 'mb03kb', 'mb04jd', 'tg01bd', 'tb03ay', 'ab13ed', 'sb03rd', 'ma02id', 'ma02md', 'sb03os', 'mb02cv', 'mb05oy', 'sb06nd', 'nf01bp', 'sb02od', 'mb03md', 'fb01vd', 'ma02iz', 'tb01ld', 'mb02sd', 'tb01nd', 'ud01md', 'mb02xd', 'mb02md', 'sg03br', 'mb04az', 'sb02ru', 'sb10qd', 'sg03bu', 'sb04qr', 'mb03lf', 'ma01ad', 'sb04rd', 'ma02gd', 'sb04ry', 'ab13ad', 'ab13md', 'nf01by', 'mb04nd', 'mb03yt', 'sg02cx', 'tg01hu', 'ab09kx', 'mb04hd', 'mb03gd', 'sb08cd', 'mb03od', 'sb04mr', 'mb02kd', 'ab09jx', 'ud01bd', 'fb01sd', 'mb03rd', 'ab07nd', 'mb03fd', 'sb03ou', 'mb03ya', 'mb01rh', 'sb08hd', 'ab08nw', 'ab07md', 'ab05qd', 'mb02qy', 'mb03id', 'ma02bd', 'ma02dd', 'mb04ed', 'sb03td', 'mb04tv', 'td04ad', 'tb01ud', 'tc01od', 'nf01bs', 'ma02oz', 'sg02nd', 'mb04ru', 'mc01rd', 'mb03bd', 'mb04tt', 'sb08ny', 'tg01ad', 'sb04qu', 'nf01bf', 'tg01qd', 'mc01td', 'mb04fp', 'mb03ud', 'mb3lzp', 'sb04nv', 'mb04qb', 'mb04wp', 'mc01sy', 'sb10dd', 'mb02sz', 'mb04kd', 'tb04bw', 'mb01ry', 'sb03mv', 'tb03ad', 'mb03gz', 'mb01ot', 'mb03be', 'tb01zd', 'ab04md', 'mb01os', 'sb03qx', 'mb04pb', 'nf01bu', 'mb04su', 'mc01od', 'sb16bd', 'mb02td', 'sg03ad', 'sb03qy', 'mb03xs', 'md03bb', 'mb04qc', 'mb03jd', 'sb01by', 'ab09nd', 'sb03md', 'mb04oy', 'mb05nd', 'ab08nx', 'mb01rb', 'dg01md', 'mb02wd', 'sb03ud', 'mb03py', 'mc01pd', 'ma02pz', 'ab09iy', 'ma02od', 'sb10td', 'tf01my', 'sb16cy', 'tg01oz', 'ab05pd', 'mb04cd', 'sb16ay', 'sb10hd', 'mb02gd', 'mc03md', 'mb03bc', 'sb04nx', 'mc01qd', 'ab01od', 'ab09jd', 'sb16ad', 'sg03bv', 'nf01bb', 'ab09dd', 'mb03lp', 'md03bf', 'mb03ah', 'mb3jzp', 'sb04mu', 'ab09kd', 'sb03ov', 'sb03pd', 'fd01ad', 'sb03sd', 'td05ad', 'mb02hd', 'mb02cd', 'mb03qx', 'sb04nd', 'mb04tb', 'sb04pd', 'tg01jy', 'tb04cd', 'tg01dd', 'ab09ed', 'mb03wx', 'tg01pd', 'tf01pd', 'sb08fd', 'ab13ax', 'nf01ba', 'sb08md', 'mb04dy', 'sb04my', 'ab09fd', 'mb04vd', 'mb01md', 'ib01oy', 'mb04ld', 'sb01bd', 'sb02mu', 'sg03bx', 'tg01ed', 'mb02qd', 'mb01ss', 'mb01rw', 'sb10ud', 'mb03cz', 'ag8byz', 'sb02ow', 'mb02dd', 'sb08nd', 'mb03my', 'mb03yd', 'tg01od', 'mc01sw', 'ma02bz', 'ib01ad', 'ab09hd', 'ud01mz', 'td03ad', 'sb03my', 'ib03bd', 'mb04dd', 'mb04xd', 'ma02hd', 'ab09ax', 'tg01hy', 'mc01sx', 'tb01ux', 'df01md', 'mb04vx', 'mb04wd', 'ab08md', 'tb01vd', 'nf01ay', 'md03bd', 'mb03rz', 'ab09ix', 'ab13dd', 'tb01iz', 'nf01bw', 'mb04qf', 'ab05sd', 'mb04db', 'mb03ai', 'sb08gd', 'mb02od', 'mb04ty', 'mb02uv', 'ib01px', 'tb01ty', 'sb03oy', 'sb03mu', 'tg01nd', 'ab09hx', 'ab09id', 'mb04id', 'mb03ed', 'mb04di', 'mb04tx', 'sb03od', 'mb04xy', 'mb03hz', 'tc04ad', 'mb01rx', 'sb02ov', 'mb03zd', 'mb03jp', 'mb02yd', 'mb04ox', 'bd01ad', 'mb04fd', 'ab05md', 'tb04bx', 'dg01od', 'sb10zd', 'mb01rt', 'sb02mr', 'ab01nd', 'mb04bz', 'ma01bz', 'ma02ed', 'mb03ld', 'tb01md', 'tb01xz', 'mb04qs', 'ab09md', 'sb10id', 'sb03sx', 'mb02cu', 'ab13bd', 'mb3oyz', 'mb02tz', 'tb01px', 'mb03iz', 'sg03bw', 'mb04dz', 'nf01bv', 'bd02ad', 'tf01md', 'mb03wd', 'mb4dbz', 'mb04tw', 'mb03vd', 'mb01oo', 'fb01rd', 'mb04rb', 'mb03ry', 'mb01xy', 'tb05ad', 'ib03ad', 'mb03xz', 'mb05md', 'mb02ed', 'sb03mw', 'sg03bd', 'mb01ru', 'mb01oc', 'bb02ad', 'ab09jw', 'mb03cd', 'mb04pa', 'sb10yd', 'mb02jx', 'tg01az', 'sg02ad', 'ma02hz', 'mb03dz', 'tg01md', 'sb08my', 'tb04ay', 'sb02nd', 'sb02mt', 'sb04rw', 'mb04wu', 'nf01be', 'de01pd', 'sb02mv', 'sb10ed', 'sb10zp', 'mb03lz', 'sb02oy', 'sb04md', 'mb03bg', 'mb03ad', 'mb01uw', 'sb10kd', 'ma02jd', 'ma02gz', 'tf01qd', 'mb03td', 'mb04gd', 'tb04bv', 'tg01ld', 'mb03ba', 'ue01md', 'mb3pyz', 'mb03xp', 'sb02ou', 'mb01nd', 'sg02cw', 'mb04yw', 'sb04mw', 'mb01uy', 'sg03by', 'ib01py', 'mb02uw', 'tg01ob', 'mb03jz', 'mb04ad', 'tg01fd', 'mb03sd', 'ab13id', 'ab08ny', 'mb03za', 'mb02uu', 'ab08nd', 'mc01wd', 'tg01ly', 'mb01uz', 'mb03xu', 'mb03nd', 'ag07bd', 'sg03bt', 'mb03xd', 'ma02nz', 'ab13dx', 'ab08nz', 'sb04ny', 'mb03ts', 'sb04qy', 'mb03rx', 'mb03af', 'ib01md', 'mb03ke', 'sb02pd', 'sb16cd', 'ab8nxz', 'mb04bd', 'tf01rd', 'mb01ux', 'mb03bz', 'sb03sy', 'mc03ny', 'sb10ld', 'ma02fd', 'td03ay', 'bb04ad', 'mb03ab', 'dk01md', 'ab05od', 'mc03nx', 'mb01td', 'tb01id', 'tg01cd', 'mb04ow', 'sb04nw', 'mb03ae', 'mb03rw', 'mb03qy', 'sb04py', 'nf01bq', 'mb03dd', 'tb01kx', 'mb01ud', 'ma01bd', 'mb03ny', 'ab08mz', 'sb02rd', 'sb04qd', 'tb01wx', 'ag08bz', 'tg01wd', 'tb04bd', 'sb02md', 'bb01ad', 'mc01sd', 'mc01vd', 'sb10ad', 'mb01vd', 'de01od', 'ib01pd', 'mb03bf', 'sb02ms', 'mb04py', 'mc03nd', 'tb01wd', 'mc01nd', 'dg01nd', 'ab09ad', 'mb02id', 'tb01yd', 'sb03mx', 'mb03vw', 'sg02cv', 'ab05rd', 'mb04ds', 'mb01od', 'mb4dpz', 'mb03oy', 'sb03qd', 'sb01bx', 'sb08dd', 'ib01od', 'sb10md', 'mb01ld', 'mb04iz', 'mb05od', 'tb01td', 'mb02vd', 'mb03fz', 'mb05my', 'mb01oh', 'mb04zd', 'sb03oz', 'tg01kz', 'mb02cx', 'tg01jd', 'mb01zd', 'mb01pd', 'sb01dd', 'mb03hd', 'sb02qd', 'mb03qw', 'tb01xd', 'ud01nd', 'sb10rd', 'ib01my', 'tf01od', 'ud01dd', 'tb01vy', 'ab09hy', 'sb04rx', 'ib01qd', 'mb04od', 'mb03qv', 'sg03bz', 'sb03or', 'mb03kd', 'ab13cd', 'tg01kd', 'mb03wa', 'mb04ts', 'mb03ka', 'mb4dlz', 'mb04qu', 'sb10fd', 'ma02pd', 'sb10jd', 'mb01qd', 'ab09jv', 'sb10vd', 'fb01td', 'ma02ez', 'tc05ad', 'sb10wd', 'md03ad', 'nf01bd', 'ma02cz', 'mb04ny', 'sb04rv', 'nf01br', 'tb01pd', 'ab01md', 'ib01bd', 'mb01yd', 'tg01nx', 'sb01fy', 'mb04md', 'sb10sd', 'mb04ud', 'mb01sd', 'ag08bd', 'ab09bx', 'bb03ad']
Derzeit in Slicot 607 Routinen implementiert.def get_slycot_method(sly):
can_methods = dir(sly)
r = re.compile("[a-z][a-z][0-9][0-9a-z][a-z][a-z]")
slycot_methods = list(filter(r.match, can_methods)) # Read Note below
return slycot_methods
slycot_methods = get_slycot_method(slycot)
print(slycot_methods)
print(f"Derzeit in Slycot {len(slycot_methods)} Methoden implementiert.")['ab01nd', 'ab05md', 'ab05nd', 'ab07nd', 'ab08nd', 'ab08nz', 'ab09ad', 'ab09ax', 'ab09bd', 'ab09md', 'ab09nd', 'ab13bd', 'ab13dd', 'ab13ed', 'ab13fd', 'ab13md', 'mb03rd', 'mb03vd', 'mb03vy', 'mb03wd', 'mb05md', 'mb05nd', 'mc01td', 'sb01bd', 'sb02md', 'sb02mt', 'sb02od', 'sb03md', 'sb03md57', 'sb03od', 'sb04md', 'sb04qd', 'sb10ad', 'sb10dd', 'sb10fd', 'sb10hd', 'sg02ad', 'sg03ad', 'sg03bd', 'tb01id', 'tb01pd', 'tb03ad', 'tb04ad', 'tb05ad', 'tc01od', 'tc04ad', 'td04ad', 'tf01md', 'tf01rd']
Derzeit in Slycot 49 Methoden implementiert.def count_methods(list_methods):
d = {}
for w in list_methods:
if w:
if w[0] in d:
d[w[0]] = d[w[0]] + 1
else:
d[w[0]] = 1
return d
slicot_methods_count = count_methods(slicot_methods)
slycot_methods_count = count_methods(slycot_methods)
print(f"{slicot_methods_count = }")
print(f"{slycot_methods_count = }")slicot_methods_count = {'m': 281, 't': 77, 'a': 60, 's': 131, 'd': 8, 'f': 6, 'i': 15, 'u': 7, 'n': 16, 'b': 6}
slycot_methods_count = {'a': 16, 'm': 7, 's': 16, 't': 10}slicot_full_names = {
"a": "Analysis Routines",
"b": "Benchmark",
"c": "Adaptive Control",
"d": "Data Analysis",
"f": "Filtering",
"i": "Identification",
"m": "Mathematical routines",
"n": "Nonlinear Systems",
"s": "Synthesis Routines",
"t": "Transformation Routines",
"u": "Utility Routines",
}
names_sli = list(slicot_methods_count.keys())
values_sli = list(slicot_methods_count.values())
names_sly = list(slycot_methods_count.keys())
values_sly = list(slycot_methods_count.values())
plt.barh(range(len(slicot_methods_count)), values_sli, tick_label=[slicot_full_names[x] for x in names_sli])
plt.barh(range(len(slycot_methods_count)), values_sly)
plt.legend(("slicot","slycot"))
plt.title("Slicot vs Slycot")
plt.show()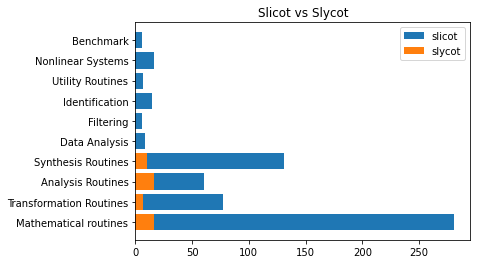
print(f"Folgende Methoden sind nur in Slyot und nicht in Slicot vorhanden: {set(slycot_methods) - set(slicot_methods)}")Folgende Methoden sind nur in Slyot und nicht in Slicot vorhanden: {'sb03md57'}print(f"Derzeit sind in Slycot {len(slycot_methods)} Methoden und in Slicot {len(slicot_methods)} implementiert.")
print(f"D.h es sind {(len(slycot_methods)-1)/len(slicot_methods)*100} % der SLICOT Routinen in Slycot vorhanden, wobei die obige Methode {set(slycot_methods) - set(slicot_methods)} abgezogen ist.")Derzeit sind in Slycot 49 Methoden und in Slicot 607 implementiert.
D.h es sind 7.907742998352553 % der SLICOT Routinen in Slycot vorhanden, wobei die obige Methode {'sb03md57'} abgezogen ist.Näherungsweise sind also weniger als 10 % der SLICOT Routinen in Slycot verpackt. Umgekehrt zeigt diese Untersuchung, welches Potenzial für Python-Control noch vorhanden ist.
In einem früheren Blogeintrag haben wir die \(\mathcal{H}_2\)-Norm für zeitdiskrete Systeme besprochen. Eine Textsuche in der SLICOT Dokumentation liefert die Routine ab13bd als jene, mit der wir die \(\mathcal{H}_2\)-Norm berechnen können.
def check_in_slycot(method, sly):
slycot_methods = get_slycot_method(sly)
return method in slycot_methodscheck_in_slycot('ab13bd',slycot)TrueDie help() Methode erlaubt uns das Studieren der Dokumentation. Wie wir sehen, müssen wir eine ganze Reihe an Parametern an die Methode übergeben. Ein Zweck des Python-Control Projekts ist es, eine einfachere Schnittstelle für den Benutzer bereitzustellen. Dadurch ist weniger Wissen über die Algorithmen notwendig.
help(slycot.ab13bd)Help on function ab13bd in module slycot.analysis:
ab13bd(dico, jobn, n, m, p, A, B, C, D, tol=0.0)
norm = ab13bd(dico, jobn, n, m, p, A, B, C, D, [tol])
To compute the H2 or L2 norm of the transfer-function matrix G
of the system (A,B,C,D). G must not have poles on the imaginary
axis, for a continuous-time system, or on the unit circle, for
a discrete-time system. If the H2-norm is computed, the system
must be stable.
Parameters
----------
dico : {'D', 'C'}
Indicate whether the system is discrete 'D' or continuous 'C'.
jobn : {'H', 'L'}
H2-norm 'H' or L2-norm 'L' to be computed.
n : int
The number of state variables. n >= 0.
m : int
The number of system inputs. m >= 0.
p : int
The number of system outputs. p >= 0.
A : (n,n) ndarray
The leading n-by-n part of this array must contain the state
dynamics matrix A of the system.
B : (n,m) ndarray
The leading n-by-m part of this array must contain the input/state
matrix B of the system.
C : (p,n) ndarray
The leading p-by-n part of this array must contain the state/output
matrix C of the system.
D : (p,m) ndarray
The leading p-by-m part of this array must contain the direct
transmission matrix D of the system.
tol : float, optional
The absolute tolerance level below which the elements of
B are considered zero (used for controllability tests).
If the user sets tol <= 0, then an implicitly computed,
default tolerance, defined by toldef = n*eps*norm(B),
is used instead, where eps is the machine precision
(see LAPACK Library routine DLAMCH) and norm(B) denotes
the 1-norm of B.
Returns
-------
norm: H2 or L2 norm of the system (A,B,C,D)
Raises
------
SlycotArithmeticError
:info == 1:
The reduction of A to a real Schur form failed
:info == 2:
A failure was detected during the reordering of the
real Schur form of A, or in the iterative process for
reordering the eigenvalues of `` Z'*(A + B*F)*Z`` along the
diagonal (see SLICOT routine SB08DD)
:info == 3 and dico == 'C':
The matrix A has a controllable eigenvalue on the imaginary axis
:info == 3 and dico == 'D':
The matrix A has a controllable eigenvalue on the unit circle
:info == 4:
The solution of Lyapunov equation failed because the
equation is singular
:info == 5:
D is a nonzero matrix
:info == 6:
The system is unstable
Warns
-----
SlycotResultWarning
:iwarn > 0:
{iwarn} violations of the numerical stability condition
occured during the assignment of eigenvalues in
computing the right coprime factorization with inner
denominator of `G` (see the SLICOT subroutine SB08DD).
import numpy as np
import scipy.linalg as linalg
Ad_stable = np.array([[0.5, 0.1],[0.1, 0.5]])
Bd = np.array([[0.],[1.]])
Cd = np.eye(2)
Dd = np.zeros((2,1))dico = 'D'
jobn = 'H'
n = 2
m = 1
p = 2
h2norm_d_slycot = slycot.ab13bd(dico, jobn, n, m, p, Ad_stable, Bd, Cd, Dd)
h2norm_d_slycot1.1732382943111324Die \(\mathcal{H}_2\) - Norm beträg also 1.1732382943111324.
Wir wollen nun eine alternative Implementierung basierend auf SciPy verwenden, wie wir sie in dem Blogeintrag
hergeleitet haben.
Da sich die obige Slycot Methode und die untere Scipy Methode aus nicht ganz ersichtlichen Gründen beeinflussen, wollen wir das Jupyter Notebook mit %reset -f neu starten. Der Grund liegt wahrscheinlich in einer LAPACK oder BLAS Variable, welche im Notebook gespeichert wird, und sowohl in der Slycot Methode als auch in der Scipy Methode verwendet wird.
%reset -fimport warnings
warnings.filterwarnings("error")
import numpy as np
import scipy.linalg as linalg
Ad_stable = np.array([[0.5, 0.1],[0.1, 0.5]])
Bd = np.array([[0.],[1.]])
Cd = np.eye(2)
Dd = np.zeros((2,1))
def h2norm_d(A,B,C,D):
""" naive implementation of the h2 system norm of linear time-discrete time-invariant systems (d-LTI)
(there might be better ways to do that, => check papers)
"""
try:
P = linalg.solve_discrete_lyapunov(A.T, B@B.T)
if np.all(np.real(linalg.eigvals(P)) < 0):
H2 = np.inf
else:
H2 = np.sqrt(np.trace(C@P@C.T+D@D.T))
except RuntimeWarning:
H2 = np.inf
return H2
h2norm_d_scipy = h2norm_d(Ad_stable,Bd,Cd,Dd)
h2norm_d_scipy1.1732382943111324Wir erhalten also dasselbe Ergebnis wie mit der Slycot Methode. Der Aufruf der Slycot Methode ist zwar etwas komplizierter, jedoch sind diese Algorithmen eigenen Implementierungen vorzuziehen.
SLICOT bietet noch sehr viel Potenzial für Python-Control. Viele Routinen können noch in Slycot Methoden verpackt werden, womit fortschrittlichere Algorithmen in Python verfügbar würden. Die Weiterentwicklung der SLICOT - Fortran 77 Bibliothek ist jedoch nicht ganz sichergestellt. Eine Umstellung auf einen neueren Fortran Standard wie etwa Fortran 2018 oder Fortran 2023 könnte dem Projekt neues Leben einhauchen. Fortran wird derzeit sehr stark weiterentwickelt.