import numpy as np
import matplotlib.pyplot as plt
plt.style.use('ggplot')
import control as ctIn ihrem Buch Advanced PID Control haben Åström und Hägglund ein verbessertes Tuning für PI-Regler vorgestellt. Wie beim Ziegler-Nichols stehen Tuning-Tabellen für den Zeitbereich als auch den Frequenzbereich zur Verfügung.
Zeitbereich
Auf Basis eines FOPTD Modells \((K,T,L)\) schlagen Åström und Hägglund folgende PI-Parametrierung vor:
| Reglertyp | \(K_p\) | \(K_i\) |
|---|---|---|
| Aström-Hägglund PI | \(\frac{0.15L+0.35T}{KL}\) | \(\frac{0.46L+0.02T}{KL^2}\) |
| Ziegler-Nichols PI | \(\frac{0.9T}{KL}\) | \(\frac{0.27T}{KL^2}\) |
Frequenzbereich
Auch auf Basis der Frequenzbereichs-Parameter \(k_c, w_c, (K)\) werden von Aström und Hägglund folgende PI-Parameter vorgeschlagen. Dieses Tuning erfordert aber einen weiteren Parameter \(K\), welcher die konstante Verstärkung der Strecke darstellt.
| Reglertyp | \(K_p\) | \(K_i\) |
|---|---|---|
| Aström-Hägglund PI | \(0.16k_c\) | \(\frac{0.16k_c+0.072/K}{T_c}\) |
| Ziegler-Nichols PI | \(0.45k_c\) | \(\frac{0.54k_c}{T_c}\) |
Hinweis: Das Åström-Hägglund Tuning liefert meist niedrigere Reglerverstärkungen als die Ziegler-Nichols Methode. Es sei noch darauf hingewiesen, dass die hier verwendete PI-Reglerstruktur eine parallele Struktur ist. Wir könnten die \(K_p\) und \(K_i\) Werte aber auf die \(K_p\) und \(T_i = K_p / K_i\) Werte umrechnen.
Beispiel
Mit diesem Beispiel wollen wir zeigen, dass modifizierte Einstellregeln oft bessere Ergebnisse liefern, als die ursprüngliche Ziegler-Nichols Methode. Ist ein Modell gegeben, so erweisen sich gerade die Frequenzbereichsmethoden als einfach anzuwenden.
Gegeben sei die Strecke (Rasterkraftmikroskop)
\[ P(s) = \frac{1-e^{-sT_n}}{sT_n(s+1)} \]
wobei für \(T_n = 2n\pi a/\omega_0 = 2n\pi\xi\). Für dieses Beispiel legen wir die Parameter mit \(\xi=0.002\) und \(n=20\) fest.
s = ct.tf('s')
n = 20
xi = 0.002
Tn = 2*n*np.pi*xi
num, den = ct.pade(Tn,4)
P = ct.minreal((s/s-ct.tf(num,den))/(s*Tn*(s+1)))
P2 states have been removed from the model\[\frac{633.3 s^2 + 4.211 \times 10^{5}}{s^5 + 80.58 s^4 + 2929 s^3 + 5.576 \times 10^{4} s^2 + 4.74 \times 10^{5} s + 4.211 \times 10^{5}}\]
Die Verstärkung \(K=P(0)\) kann mit der Methode control.gcgain oder mit der Methode ct.freqresp ermittelt werden.
K = ct.dcgain(P)
print(f"Die Verstärkung der Strecke lautet {K}.")
np.allclose(ct.dcgain(P),ct.freqresp(P,0)[0][0])Die Verstärkung der Strecke lautet 0.9999999999999978.Truegm, pm, wg, wp = ct.margin(P)
kc = gm
wc = wg
Tc = 2*np.pi/wc
print("Kritische Verstärkung", kc)
print("Kritische Frequenz", wc)
print("Kritische Periodenzeit", Tc)Kritische Verstärkung 21.726882224637702
Kritische Frequenz 13.110950964797556
Kritische Periodenzeit 0.4792318516063189def astrom_hagglund(kc,Tc,K):
kp = kc*0.16
ki = (0.16*kc+0.72/K)/(Tc)
return kp, kidef ziegler_nichols(kc,Tc):
kp = kc*0.45
#Ti = Tc/1.2
ki = 0.54*kc/Tc
return kp, kikp, ki = ziegler_nichols(kc,Tc)
print(f" Die Reglerverstärkungen ergeben sich mit der Ziegler-Nichols Methode zu {kp = } und {ki = }.")
C_1 = kp+ki/s
kp, ki = astrom_hagglund(kc,Tc,K)
print(f" Die Reglerverstärkungen ergeben sich mit der Aström-Hägglund Methode zu {kp = } und {ki = }.")
C_2 = kp+ki/s Die Reglerverstärkungen ergeben sich mit der Ziegler-Nichols Methode zu kp = 9.777097001086966 und ki = 24.48192114522143.
Die Reglerverstärkungen ergeben sich mit der Aström-Hägglund Methode zu kp = 3.4763011559420325 und ki = 8.756306872918845.Das verbesserte Verfahren nach Åström und Hägglund liefert kleinere Reglerparameter und der PI-Regler ist somit als weniger aggressiv anzusehen.
L_1 = ct.minreal(P*C_1)
T_1 = ct.feedback(L_1,1)
_,_,gs,_,_,ws = ct.stability_margins(L_1)
print(f"Die Stabilitätsreserve tritt bei {ws = } rad/s auf und nimmt den Wert {gs = } an.")
L_2 = ct.minreal(P*C_2)
T_2 = ct.feedback(L_2,1)
_,_,gs,_,_,ws = ct.stability_margins(L_2)
print(f"Die Stabilitätsreserve tritt bei {ws = } rad/s auf und nimmt den Wert {gs = } an.")0 states have been removed from the model
Die Stabilitätsreserve tritt bei ws = 9.487327421223707 rad/s auf und nimmt den Wert gs = 0.2685244048683104 an.
0 states have been removed from the model
Die Stabilitätsreserve tritt bei ws = 5.7624674998827174 rad/s auf und nimmt den Wert gs = 0.6139198817877397 an.Der PI-Regler nach Åström und Hägglund besitzt eine größere Stabilitätsreserve und ist somit weniger empfindlich gegenüber Parameter-Schwankungen der Strecke. Diese größere Stabilitätsreserve ist mithilfe des Nyquist-Diagramms deutlich zu erkennen.
plt.figure(figsize=(16,8))
ct.nyquist([P,L_1,L_2])
circle1 = plt.Circle((0, 0), 1., color='black', fill=False)
plt.gca().add_patch(circle1)
plt.ylim([-3,3])
plt.xlim([-3,3])
plt.gca().set_aspect('equal', 'box')
# for legend
lines = plt.gca().get_lines()
legend = plt.legend([lines[i] for i in [0,3,6]], ["Prozess", "Ziegler-Nichols", "Aström-Hägglund"], loc=1)
plt.gca().add_artist(legend)
plt.show()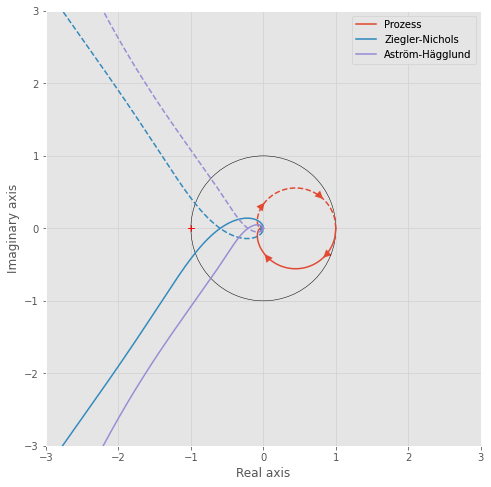
plt.figure(figsize=(16,8))
tout, yout = ct.step_response(T_1, 10)
plt.plot(tout, yout, label='Ziegler-Nichols')
tout, yout = ct.step_response(T_2, 10)
plt.plot(tout, yout, label='Aström-Hägglund')
plt.legend()
plt.show()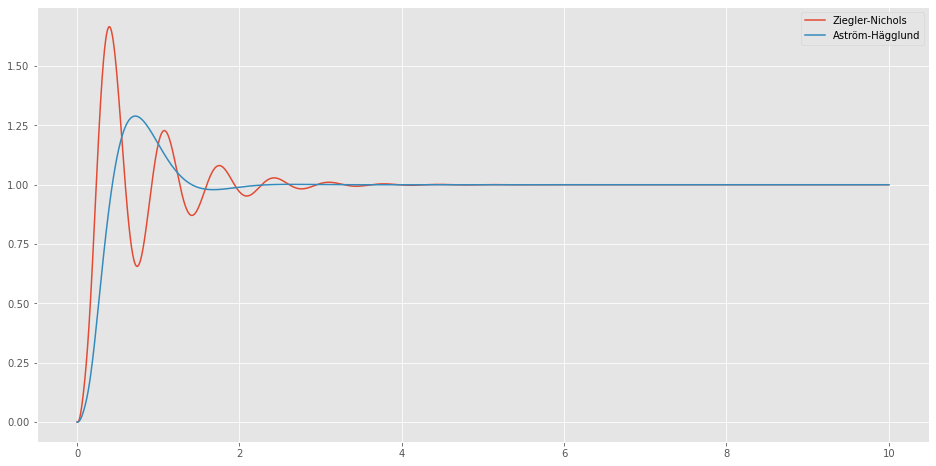
Fazit
Wir sehen, dass das verbesserte Verfahren nach Åström-Hägglund einen weniger aggressiven und robusteren PI-Regler erzeugt.
Die bekannten Tuning-Verfahren wie Ziegler-Nichols und Chien-Hrones-Reswick liefern oftmals nicht die besten PID-Regler. Es kann hilfreich sein, mit verschiedenen PID-Tuning-Verfahren vertraut zu sein.
Referenzen
- Feedback Systems: An Introduction for Scientists and Engineers, Second Edition, 2020/2022 (Karl J. Aström, Richard M. Murray)
- PID Controllers: Theory, Design and Tuning, Second Edition, 1995 (Karl J. Åström, Tore Hägglund)
- Advanced PID Control, 2006 (Karl J. Åström, Tore Hägglund)